


添加时间:2024-05-13 09:34:21
忙了好久一阵子,年前终于有时间休整一下了,会把之前的坑填一填。
去年搞了个博客打算写学术文章,最终发现还是没有知乎编辑舒服,
所以就打算把博客留给生活,知乎留给工作。
大部分的机器学习算法的本质都是建立优化模型,通过最优化方法对目标函数(或损失函数)进行优化,从而训练出最好的模型。常见的最优化方法有梯度下降法、牛顿法和其它衍生算法等。
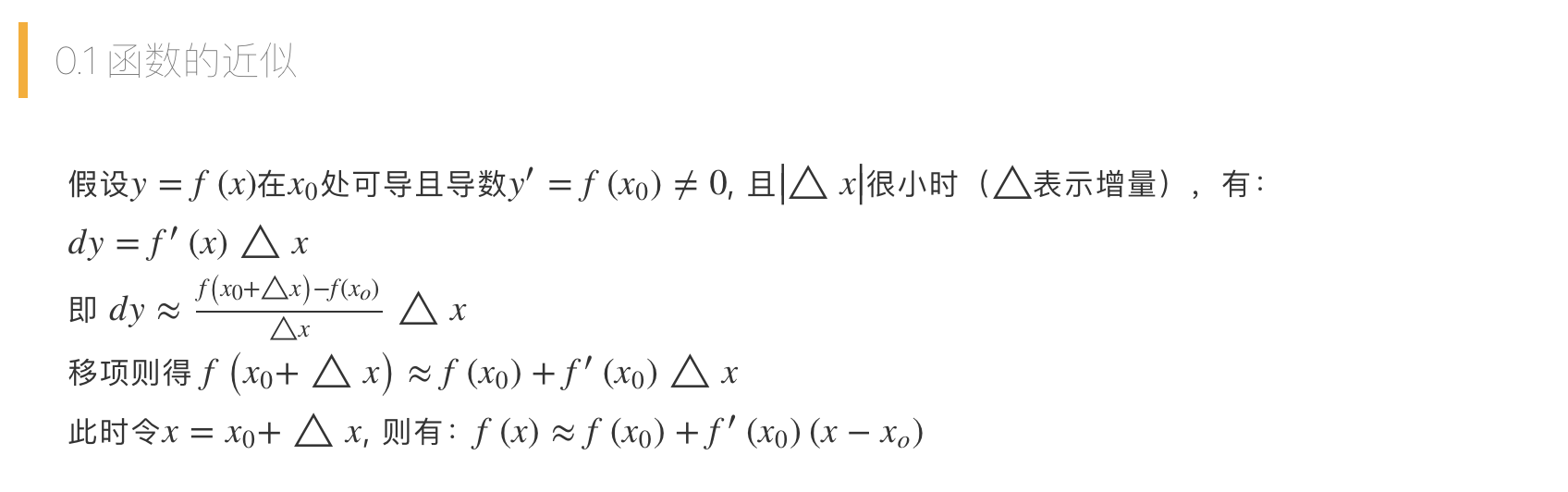
那么在开始讲解前,我们先回顾一下数学上的一些基本概念。

梯度下降法是最早最简单,也是最为常用的最优化方法。梯度下降法实现简单,当目标函数是凸函数时,梯度下降法的解是全局解。一般情况下,其解不保证是全局最优解,梯度下降法的速度也未必是最快的。梯度下降法的优化思想是用当前位置负梯度方向作为搜索方向,因为该方向为当前位置的最快下降方向,所以也被称为是”最速下降法“。最速下降法越接近目标值,步长越小,前进越慢。
导数
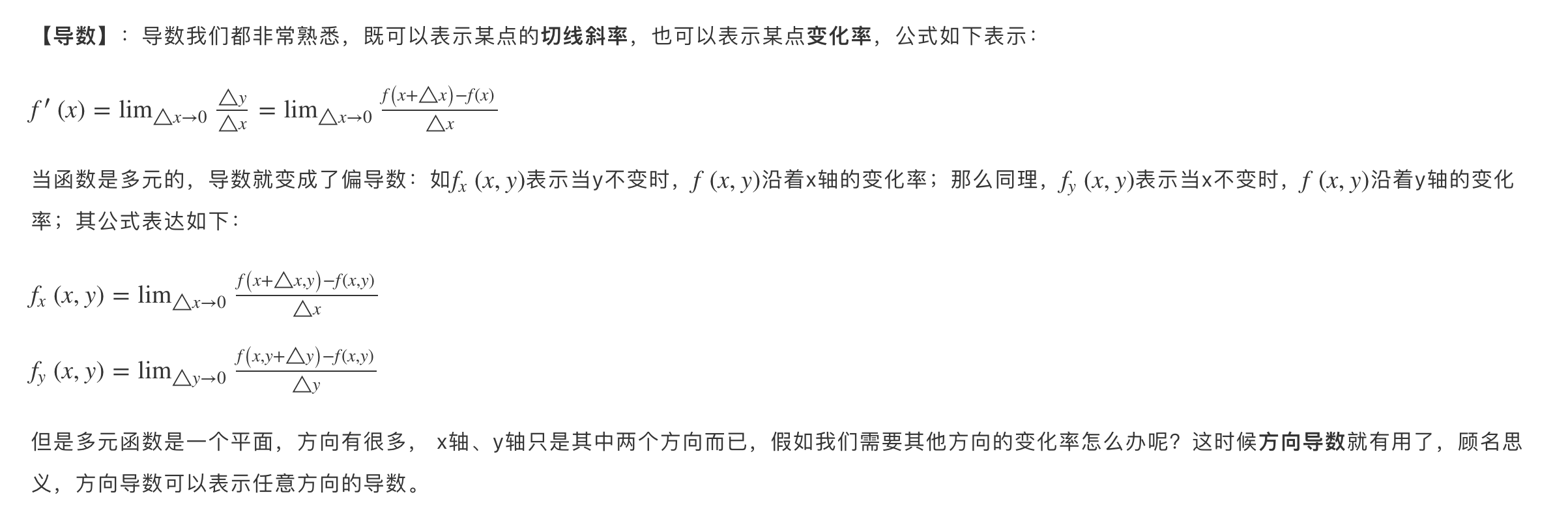
方向导数

梯度公式
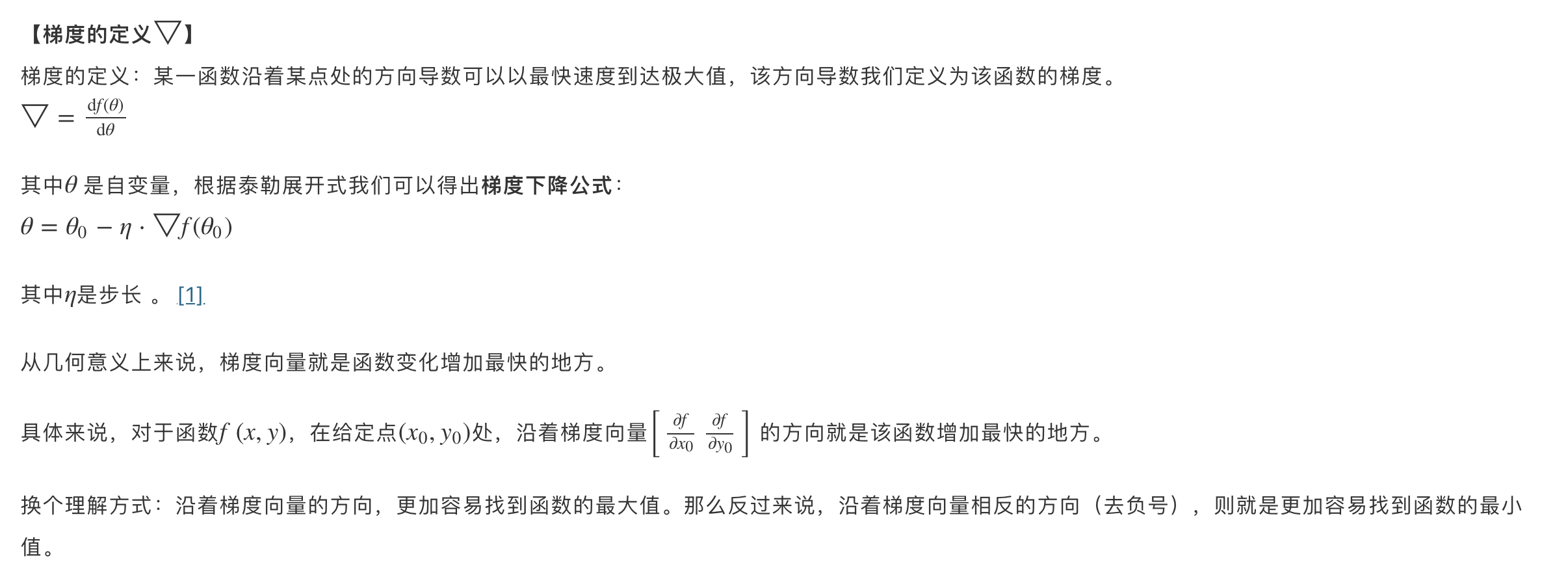
比如我们在一座大山上的某处位置,由于我们不知道怎么下山,于是决定走一步算一步,也就是在每走到一个位置的时候,求解当前位置的梯度,沿着梯度的负方向,也就是当前最陡峭的位置向下走一步,然后继续求解当前位置梯度,向这一步所在位置沿着最陡峭最易下山的位置走一步。这样一步步的走下去,一直走到觉得我们已经到了山脚。当然这样走下去,有可能我们不能走到山脚,而是到了某一个局部的山峰低处(局部最小值)。
从上面的解释可以看出,梯度下降不一定能够找到全局的最优解,有可能是一个局部最优解。当然,如果损失函数是凸函数,梯度下降法得到的解就一定是全局最优解。

梯度下降法步骤
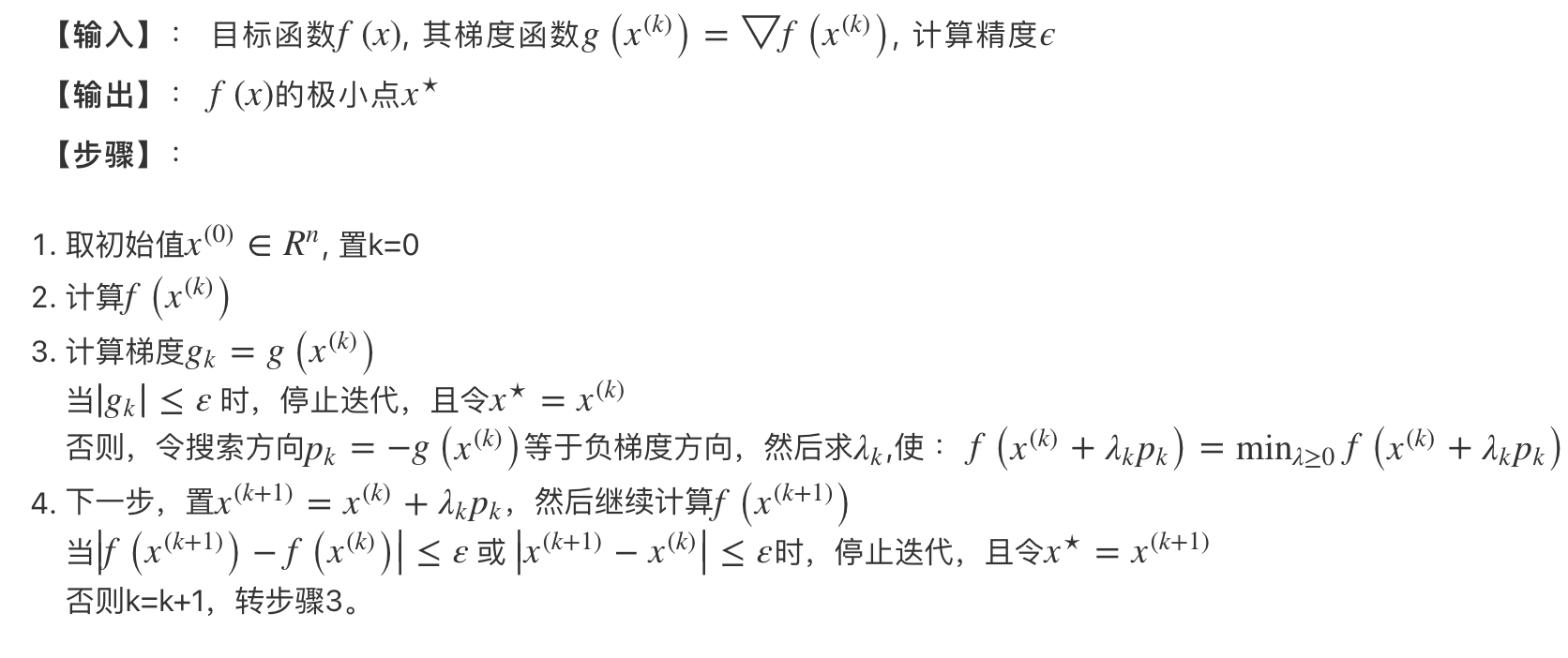
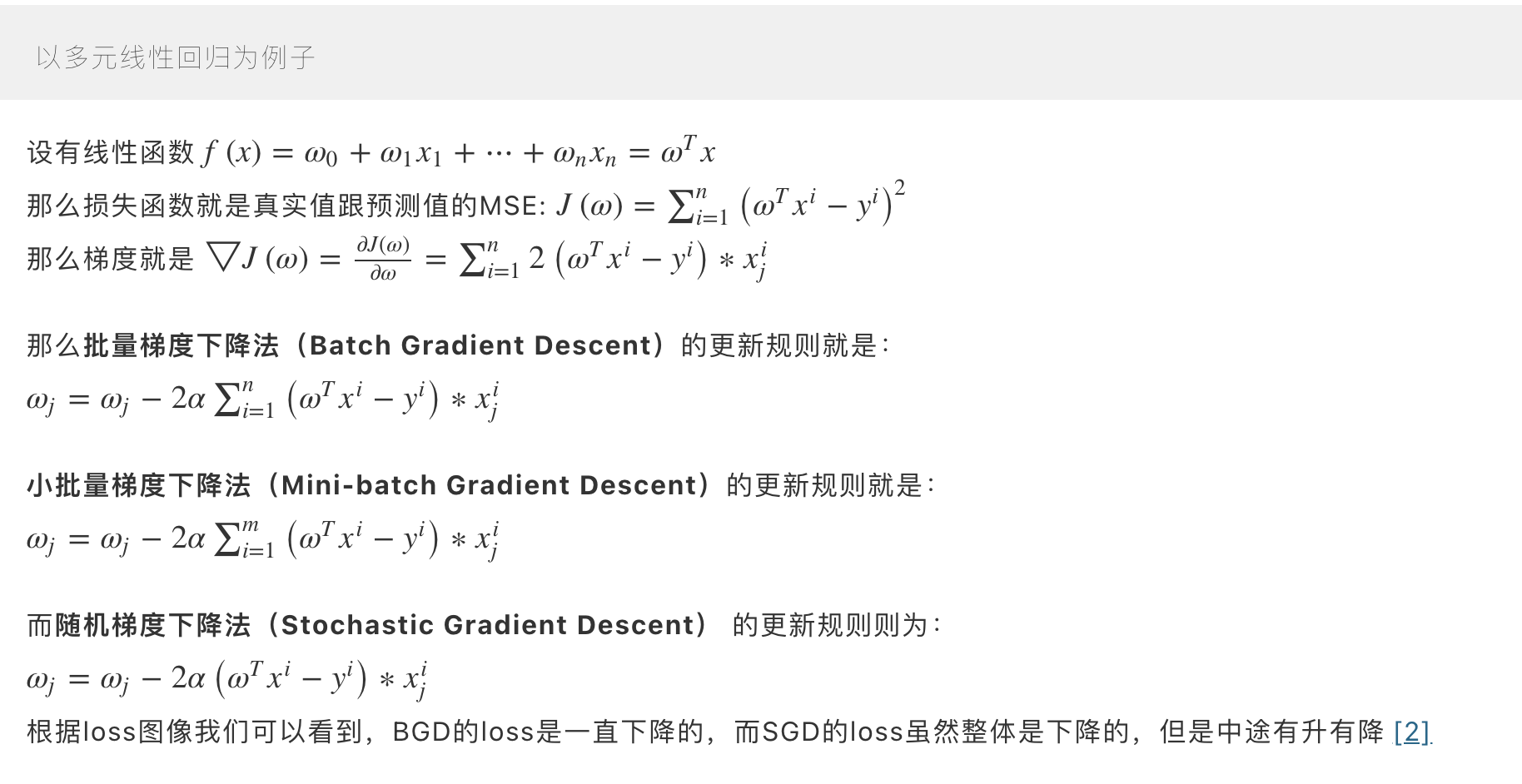
具体例子

在使用梯度下降时,需要进行调优。哪些地方需要调优呢?
1. 算法的步长选择 :步长取值取决于数据样本,可以多取一些值,从大到小,分别运行算法,看看迭代效果,如果损失函数在变小,说明取值有效,否则要增大步长。步长太大,会导致迭代过快,甚至有可能错过最优解。步长太小,迭代速度太慢,很长时间算法都不能结束。所以算法的步长需要多次运行后才能得到一个较为优的值。
2. 算法参数的初始值选择 :初始值不同,获得的最小值也有可能不同,因此梯度下降求得的只是局部最小(当然如果损失函数是凸函数则一定是最优解)。由于有局部最优解的风险,需要多次用不同初始值运行算法,关键损失函数的最小值,选择损失函数最小化的初值。
3. 归一化 :由于样本不同特征的取值范围不一样,可能导致迭代很慢,为了减少特征取值的影响,可以对特征数据归一化。
1. 靠近极小值时收敛速度减慢,如下图所示;
2. 直线搜索时可能会产生一些问题;
3. 寻找的是局部最优,可能会“之字形”地下降。
批量梯度下降法(Batch Gradient Descent)
批量梯度下降法,是梯度下降法最常用的形式,具体做法也就是在更新参数时使用所有的样本来进行更新。 这样一来每迭代一步,都要用到训练集所有的数据,如果数据量很大,那么可想而知这种方法的迭代速度会很慢。所以,这就引入了另外一种方法,随机梯度下降。
随机梯度下降法(Stochastic Gradient Descent)
随机梯度下降(Stochastic Gradient Descent)每次迭代只用到了一个样本,在样本量很大的情况下,常见的情况是只用到了其中一部分样本数据即可迭代到最优解。因此随机梯度下降比批量梯度下降在计算量上会大大减少。SGD有一个缺点是,其噪音较BGD要多,使得SGD并不是每次迭代都向着整体最优化方向。而且SGD因为每次都是使用一个样本进行迭代,因此最终求得的最优解往往不是全局最优解,而只是局部最优解。但是大的整体的方向是向全局最优解的,最终的结果往往是在全局最优解附近。
小批量梯度下降法(Mini-batch Gradient Descent)
小批量梯度下降法是批量梯度下降法和随机梯度下降法的折衷,也就是对于m个样本,我们采用 x个样子来迭代,1<x<m 。
def train(X, y, W, B, alpha, max_iters):
'''
使用了所有的样本进行梯度下降
X: 训练集,
y: 标签,
W: 权重向量,
B: bias,
alpha: 学习率,
max_iters: 最大迭代次数.
'''
dW = 0 # 权重梯度收集器
dB = 0 # Bias梯度的收集器
m = X.shape[0] # 样本数
for i in range(max_iters):
dW = 0 # 每次迭代重置
dB = 0
for j in range(m):
# 1. 迭代所有的样本
# 2. 计算权重和bias的梯度保存在w_grad和b_grad,
# 3. 通过增加w_grad和b_grad来更新dW和dB
W = W - alpha * (dW / m) # 更新权重
B = B - alpha * (dB / m) # 更新bias
return W, B 牛顿法是一种在实数域和复数域上近似求解方程的方法。方法使用函数f(x)的泰勒级数的前面几项来寻找方程f(x)=0的根。牛顿法最大的特点就在于它的收敛速度很快。
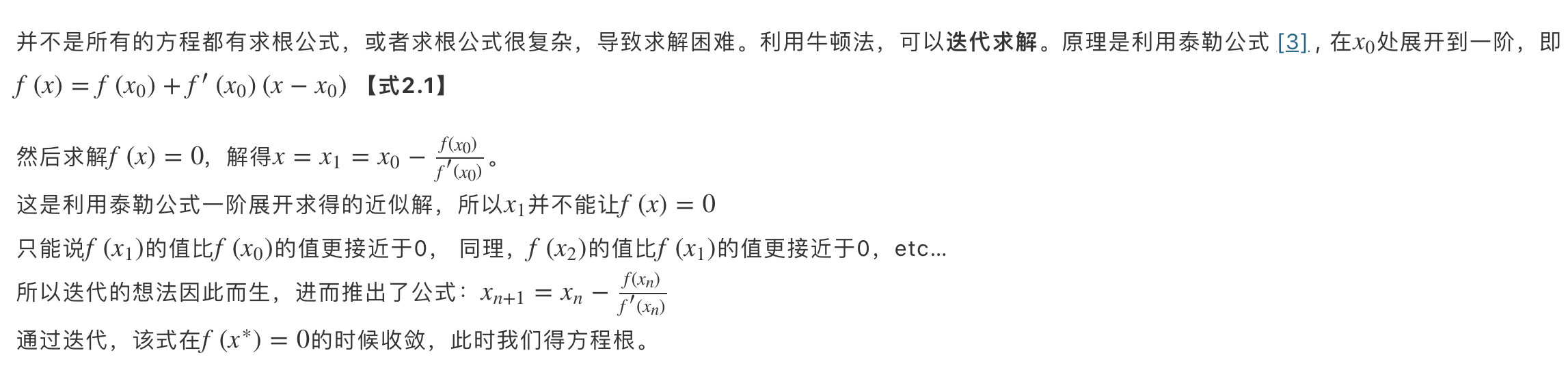

牛顿法步骤
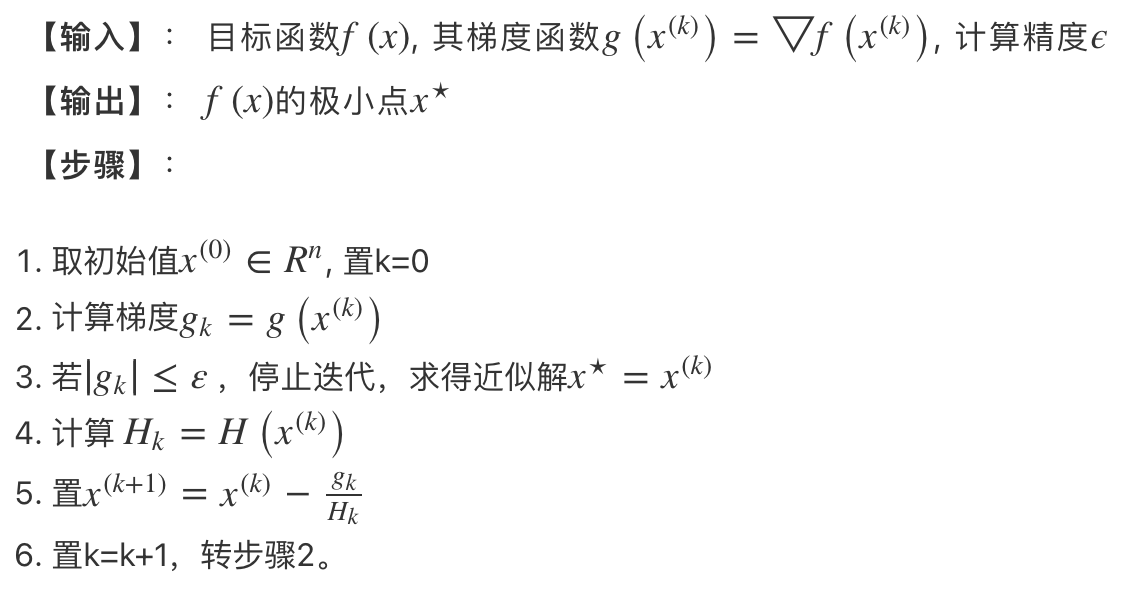
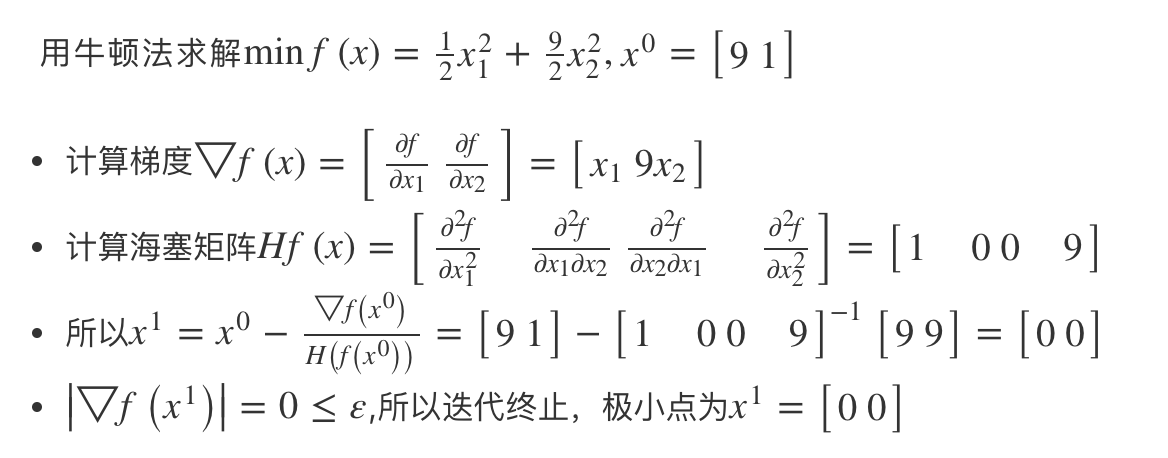
具体例子
总的来说,梯度法和牛顿法有如下区别:
def newton(f, x, iters):
"""
实现牛顿法
:param f: 原函数
:param x: 初始值
:param iters: 遍历的最大epoch
:return:
"""
Hessian_T = np.linalg.inv(hessian(f, x))
H_G = np.matmul(Hessian_T, jacobian(f, x))
x_new = x - H_G
print("第1次迭代后的结果为:", x_new)
for i in range(1, iters):
Hessian_T = np.linalg.inv(hessian(f, x_new))
H_G = np.matmul(Hessian_T, jacobian(f, x_new))
x_new = x_new - H_G
print("第"+str(i+1)+"次迭代后的结果为:", x_new)
return x_new最基本的最优化方法就介绍到这里,其余的还有拟牛顿法、DFP(Davidon-Fletcher-Powell)算法、BFGS(Broyden-Fletcher-Goldfard-Shano)算法等,有需求的朋友自己查。
本文为VoidOc[1]博主原创文章,未经博主允许不得转载。原文地址:https://voidoc.blog/21627.html
地址:海南省海口市电话:0898-08980898传真:0898-1230-5678
Copyright © 2012-2018 耀世娱乐-耀世注册登录入口 版权所有ICP备案编号:琼ICP备xxxxxxxx号

